| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ÖCŲ„╚╦Ą─äė┴”īWų„ę¬čąŠ┐║═Ęų╬÷ū„ė├ė┌ÖCŲ„╚╦╔ŽĄ─┴”║═┴”ŠžĪŻ×ķ┴╦╩╣ÖCŲ„╚╦╝ė╦┘▀\äėŻ¼ “ī(q©▒)äėŲ„ąĶę¬╠ß╣®ūŃē“Ą─┴”║═┴”ŠžüĒ“ī(q©▒)äėÖCŲ„╚╦▀\äėĪŻ═©▀^Į©┴óÖCŲ„╚╦Ą─äė┴”īWĘĮ│╠üĒ┤_Č© ┴”Īó┘|(zh©¼)┴┐║═╝ė╦┘Č╚ęį╝░┴”ŠžĪó▐D(zhu©Żn)äėæT┴┐║═ĮŪ╝ė╦┘Č╚ų«ķgĄ─ĻP(gu©Īn)ŽĄŻ¼▓óėŗ╦Ń│÷═Ļ│╔ÖCŲ„╚╦╠žČ©▀\ äėĢrĖ„“ī(q©▒)äėŲ„╦∙ąĶĄ─“ī(q©▒)äė┴”ĪŻ═©▀^ÖCŲ„╚╦äė┴”īWĘų╬÷Ż¼įO(sh©©)ėŗš▀┐╔ę└ō■(j©┤)ÖCŲ„╚╦Ą─═Ō▓┐▌d║╔ėŗ╦Ń │÷ÖCŲ„╚╦Ą─Z┤¾▌d║╔Ż¼▀MČ°×ķÖCŲ„╚╦▀xō±║Ž▀mĄ─“ī(q©▒)äėŲ„ĪŻ
╚ń═¼▀\äėīWŻ¼äė┴”īWę▓ėąā╔éĆŽÓĘ┤Ą─å¢Ņ}ĪŻäė┴”īWš²å¢Ņ}╩Ūęčų¬ÖCąĄ╩ųĖ„ĻP(gu©Īn)╣Ø(ji©”)Ą─ū„ė├┴” ╗“┴”ŠžŻ¼Ū¾Ė„ĻP(gu©Īn)╣Ø(ji©”)Ą─╬╗ęŲĪó╦┘Č╚║═╝ė╦┘Č╚Ż¼╝┤▀\äė▄ē█EĪŻäė┴”īW─µå¢Ņ}╩Ūęčų¬ÖCąĄ╩ųĄ─▀\äė ▄ē█EŻ¼╝┤Ė„ĻP(gu©Īn)╣Ø(ji©”)Ą─╬╗ęŲĪó╦┘Č╚║═╝ė╦┘Č╚Ż¼Ū¾Ė„ĻP(gu©Īn)╣Ø(ji©”)╦∙ąĶꬥ─“ī(q©▒)äė┴”╗“┴”ŠžĪŻ
ļSų°╣żśI(y©©)ÖCŲ„╚╦Ž“Ė▀Š½Č╚ĪóĖ▀╦┘Īóųž▌d╝░ųŪ─▄╗»ĘĮŽ“░l(f©Ī)š╣Ż¼ī”ÖCŲ„╚╦įO(sh©©)ėŗ║═┐žųŲĘĮ├µĄ─ ę¬Ū¾Ė³Ė▀┴╦Ż¼ė╚Ųõ╩Ūī”┐žųŲĘĮ├µŻ¼ÖCŲ„╚╦ę¬Ū¾äėæB(t©żi)īŹĢr┐žųŲĄ─ł÷║ŽįĮüĒįĮČÓ┴╦Ż¼╦∙ęįÖCŲ„╚╦ Ą─äė┴”īWĘų╬÷ė╚×ķųžę¬ĪŻ▒Šš┬ęį╣żśI(y©©)ÖCŲ„╚╦×ķ└²ėæšō╣żśI(y©©)ÖCŲ„╚╦Ą─äė┴”īWĪŻ
╣żśI(y©©)ÖCŲ„╚╦╩ŪÅ═ļsĄ─äė┴”īWŽĄĮy(t©»ng)Ż¼ė╔ČÓéĆ▀BŚU║═ČÓéĆĻP(gu©Īn)╣Ø(ji©”)ĮM│╔Ż¼Š▀ėąČÓéĆ▌ö╚ļ║═ČÓéĆ▌ö │÷Ż¼┤µį┌ų°ÕeŠCÅ═ļsĄ─±Ņ║ŽĻP(gu©Īn)ŽĄ║═ć└ųžĄ─ĘŪŠĆąįĪŻ─┐Ū░Ż¼│Żė├Ą─ĘĮĘ©ėą└ŁĖ±└╩╚š (Lagrange) ║═┼ŻŅD-ÜW└Ł (Newton-Euler) Ą╚ĘĮĘ©ĪŻŲõųąŻ¼┼ŻŅD-ÜW└ŁĘ©╩Ū╗∙ė┌▀\äėū°ś╦ŽĄ ║═▀_└╩žÉĀ¢įŁ└ĒüĒĮ©┴óŽÓæ¬(y©®ng)Ą─▀\äėĘĮ│╠Ż¼╩Ū┴”Ą─äėæB(t©żi)ŲĮ║ŌĘ©ĪŻ«öė├┤╦Ę©ĢrŻ¼ąĶÅ─▀\äėīW│÷░l(f©Ī) Ū¾Ą├╝ė╦┘Č╚Ż¼▓óŽ¹╚źĖ„ā╚(n©©i)ū„ė├┴”ĪŻī”ė┌▌^Å═ļsĄ─ŽĄĮy(t©»ng)Ż¼┤╦ĘNĘų╬÷ĘĮĘ©╩«ĘųÅ═ļs┼c┬ķ¤®ĪŻ└ŁĖ± └╩╚šĘ©╩Ū╣”─▄ŲĮ║ŌĘ©Ż¼╦³ų╗ąĶę¬╦┘Č╚Č°▓╗▒žŪ¾ā╚(n©©i)ū„ė├┴”ĪŻę“┤╦Ż¼▀@╩Ūę╗ĘNų▒ĮžČ°║å▒ŃĄ─ ĘĮ Ę© ĪŻ
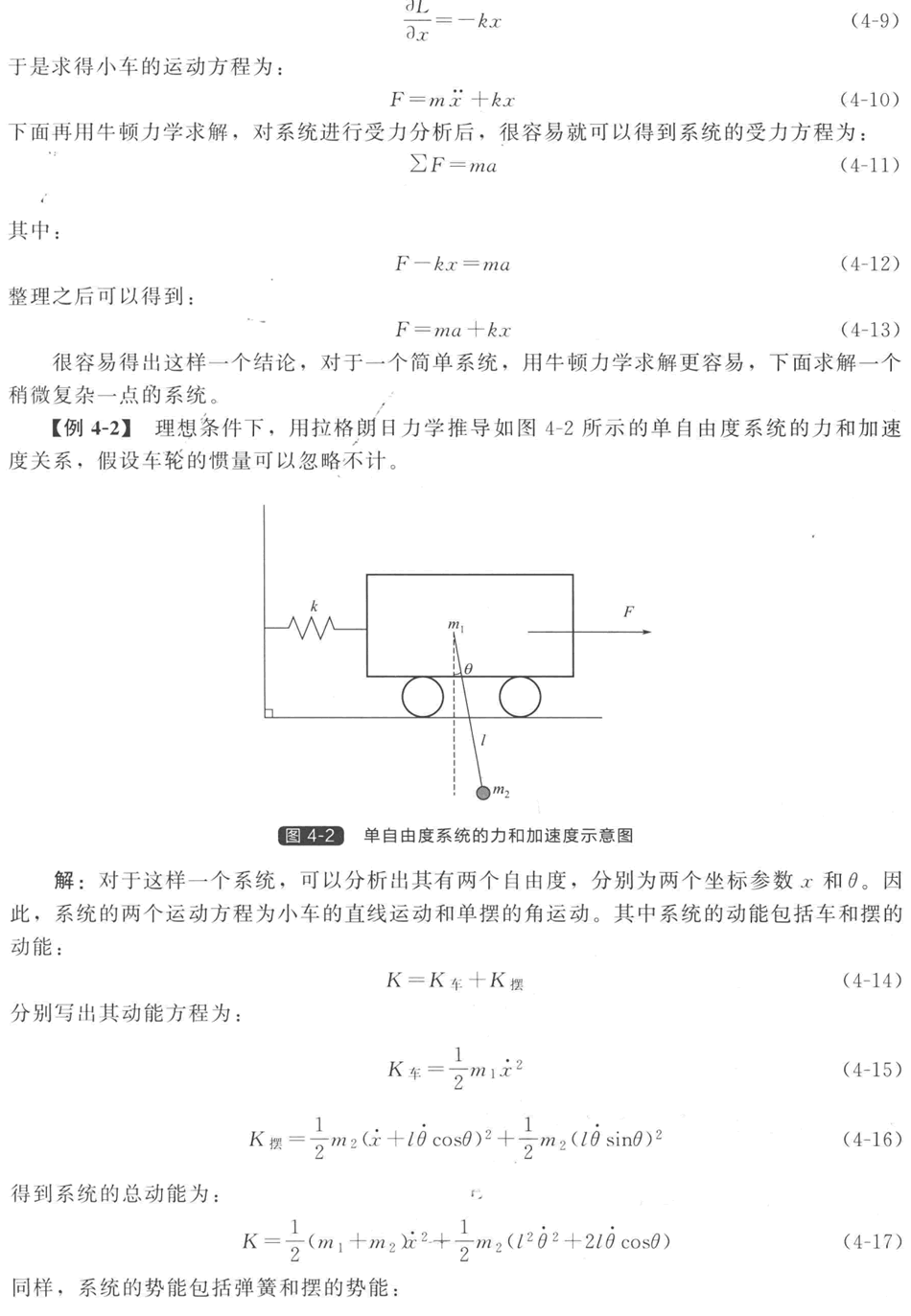
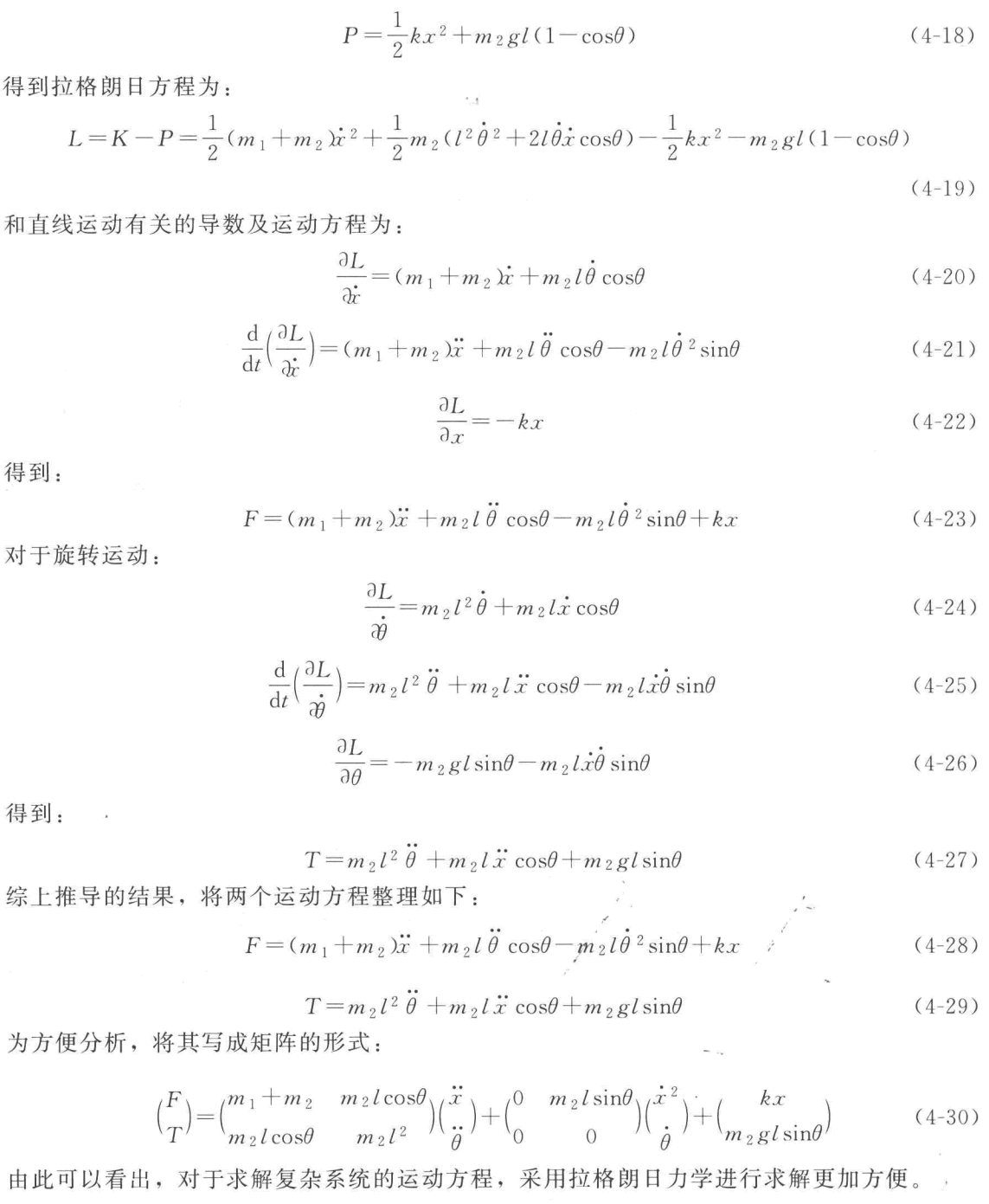
Ž┬├µĮķĮB└ŁĖ±└╩╚šäė┴”īWĘĮ│╠ĪŻ
└ŁĖ±└╩╚š║»öĄ(sh©┤)L▒╗Č©┴x×ķŽĄĮy(t©»ng)Ą─äė─▄K ║═ä▌─▄P ų«▓ŅŻ¼╝┤ L=K ę╗P ╩Įųą KĪ¬Ī¬ ÖCŲ„╚╦╩ų▒█Ą─┐éäė─▄Ż╗
PĪ¬Ī¬ ÖCŲ„╚╦╩ų▒█Ą─┐éä▌─▄ĪŻ ÖCŲ„╚╦ŽĄĮy(t©»ng)Ą─└ŁĖ±└╩╚šĘĮ│╠×ķ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äš(w©┤)ÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äš(w©┤)ÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |